| ■測量機器全般 |
Q. 電源が入りません。  |
A.バッテリーは充電されていますか?バッテリーの接点は汚れていませんか?充電と接点の清掃をお願いい
たします。改善されない場合、修理になる場合がありますので係員をお呼び下さい。
|
| Q.暫く調整をしていないのですが、大丈夫でしょうか? |
A.少なくとも年に1度位の調整点検をお勧めいたします。運搬中や設置時の振動によりくるいが生じる場合が
あります。
|
Q.自動レベルで、正と反で視準した時、大きく狂うのですが?  |
A.自動補正部が調子が悪い場合が考えられます。点検をお勧めいたします。自動補正部の調整または部品の
交換が必要になる場合があります。係員をお呼び下さい。
|
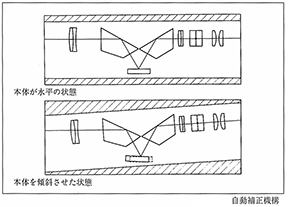
| Q.自動レベル(オートレベル)で、視準線が自動的に水平位置に戻らないことがある? |
A.軽く叩いたり、正反に振ると水平位置に戻る場合は、自動補正機構の不具合が考えられます。自動補正部の
調整または自動補正部の交換が必要になる場合があります。係員をお呼び下さい。
|
| Q.オートレベル、チルチングレベル、電子レベルの点検方法は? (作業前点検方法) |
A.
1.気泡管の点検
三脚を用いて水平にして約180°回転させても気泡が中心であること。
2.横軸の水平
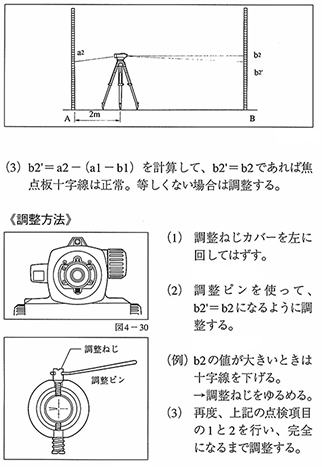
①約50m位離れた壁などの中央に三脚を用いて機械を整準してA及びBを視準して壁に印をつける。
②どちらか一方の壁から2~3mの位置に機械を移動して整準しA'及びB'を視準し壁に印をつける。
③A~A'とB~B'の差が等しければ機械は正常である。(許容誤差±5mm以内)
|
Q.オートレベル、TSの水平が少し狂っているのでヘアーピン(十字クロス)で調整しても良いの?  |
A.
以前のオートレベルは、ヘアークロス(十字線)だけでピン調整していましたが、最近のオートレベル
は視準高と十字クロスを水平位置に調整する事になっていて、内部にある調整ピンで自動補正部の
傾き調整をする場合が多くなってきています。但し、ヘアークロス(十字線)が視準高と同じ水平位置
になっていない場合は、ヘア-クロスピンを水平になるよう調整します。
トータルステーション(TS)は、 ヘアークロス(十字線)をピン調整するのはNGです。
最近のTSは視準軸と光軸が同一軸上となっているため、ヘアークロス(十字線)調整を行わず、
ほとんど場合は電気的調整となっています。
調整が必要な場合は、販売店又はサービス店にご相談下さい。
|
| Q.プリズム定数って何? |
A.光がガラスの中を通過するときの速度は空気中よりも屈折率分だけ遅くなり、その分だけ実際の距離より
も長く表示されます。そのため定数を引く必要があります。TSにプリズム定数を入力してプリズムの定数
と同じにする必要があります。
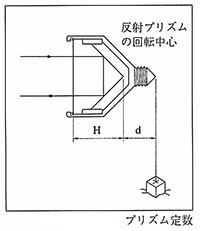
各メーカー及び型名によって、プリズム定数が違います。プリズム定数につきましては
メーカー及び販売店へご確認下さい。
|
| Q.プリズムの定数って何ミリなの? |
A.各メーカー及び型名によって、プリズム定数が違います。主要メーカーのプリズム定数は
下記の表からご参照頂けます。
※表の数値の間違えにつきましては保証しかねますので、測定前に再度、メーカー及び販売店へご確認下さい。
各メーカーのプリズム定数表
|
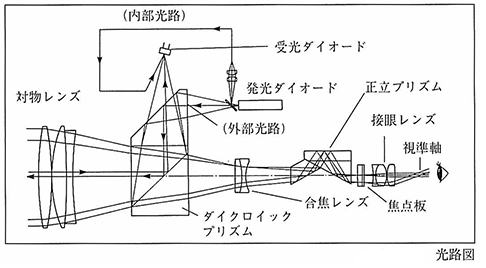
| Q.トータルステーション(TS)とは? |
A.
トータルステーションとは、1台の機械で、角度(鉛直角・水平角)と距離を同時に測定する電子式測距測角儀
で、測角望遠鏡の光軸(視準軸)と光波距離計の光軸が同軸になっていること、電子的に処理された測定
データが外部機器に出力できること、この2点が最大の特徴となっている。
|
| Q.光波測距儀、トータルステーションの点検方法は? (作業前点検方法) |
A.
<横気泡管検査方法>
1.横気泡管が2本のネジと平行になるように本体上部を合わせて、整準ネジを回して気泡を中央に合わせる。
2.水平固定ネジをゆるめ本体上部を90゜回転する。
3.2本のネジに対し、直角の位置に合わせた後、直角方向のネジを 回して気泡を中央に合わせる。
4.次に本体を180゜回転して気泡の位置を読み取り、気泡が中央からずれていなければ、判定を「良」
とする。
<円形気泡管検査方法>
1.前項同様、横気泡管の整準で機械本体を整準する。
2.円形気泡管の位置を読み取り、気泡が中央からずれていなければ、判定を「良」とする。
<傾斜センサー検査方法>
1.傾斜角センサーの調整モードにします。
2.傾斜角の表示が安定したら、傾斜角αを記録します。
3.水平固定ネジをゆるめ、水平角で機械を180゜回転させます。
4.表示が安定したら、傾斜角βを記録します。
5.傾斜角センサーの0点のずれ量(α+β)/2を計算します。計算値が誤差で、規格内であれば「良」
とする。
<焦点板十字線の検査方法>
1.明瞭に見える目標点を十字線のA点に合わせます。
2.望遠鏡微動つまみを動かし、目標点を縦線上のB点へ移動します。このとき、目標点が縦線に沿って
平行移動
すれば「良」とする。
<光学垂球検査方法>
1.機械本体を整準し、正確に光学垂球で測点を求心します。
2.本体上部を180゜回転し、光学垂球の二重丸(十字線)と測点の位置を点検します。測点が中央の
場合は「良」とする。
<測定定数検査方法>
1.約100mの距離をとれる平坦な場所A,Bを探し、ほぼ中央にC点を設置します。
2.A点に機械を据え付けて、水平距離ABを10回測定します。
3.C点に機械を据え付けて、水平距離CA,CBをそれぞれ10回測定します。
4.AB,CA,CBの各10回行った測定の平均値を求めます。
5.測定定数Kを算出します。 K=AB-(CA+CB)これを2,3回求め、Kが1回でも規格内で
あれば「良」とする。
|
Q.ポール用水準器やピンプリズム又は360°LEDターゲットの円形気泡管は何処で調整できるの?  |
A.
気泡管の調整は、専用の冶具を用いて平面が確保された環境で調整を行います。
点検調整の設備を保有の販売店様にご依頼ください。
また、当社では、調整用治具を用意して調整が可能ですので、調整が必要な方はお問合せ下さい。

|
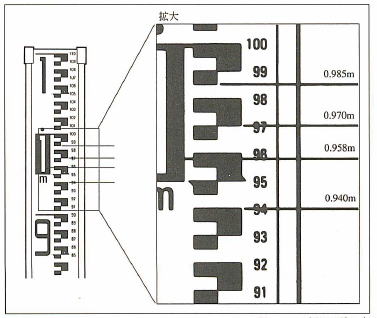
| Q.普通標尺の読み方(高さ)をお教えて下さい? |
A.
普通標尺とは、アルミ、強化プラスチック・
グラスファイバーなどでできている標尺のこ
と。構造は、箱尺、中折れ尺、直尺など。
木製の箱尺は普通標尺に分類される。全長は
1~5m。目盛は2~10mm単位で、読み取り
1mm~5mmである。
読み方は右図をご参照下さい。 |
 |
|
| Q.光波測距儀(TS)の「位相差測定」と「パルス測定」の違いは何? |
A.
位相差
測定方式 |
光を波に変え、これがプリズムにより反射され戻ってきた時の、波の差(位相差)から距離を
求める。
|
測定距離を伸ばし分解能を上げるためには、測定時間の制限が発生します。光源には半導体
レーザ(可視光)が使われ、照射ポイントが肉眼で確認出来ます。レーザスポット径が小さく、
狭いところでの測定やピンポイント測定に適しています。
|
パルス
測定方式 |
ストロボのように、短く発光したパルス測距光を用いて、発光時間とプリズムに反射して戻
った時間との差から、距離を求める。
|
立ち上がりが速い反面、距離分解能を得るには時間測定が必要となり、電子回路、半導体レ
ーザ素子、受光素子などの超高速が要求され、小型化や低コスト化が難しくなります。大き
な光ピークパワーが必要なため、赤外光のレーザが使われ、そのため測定ポイントの視認が
できません。
|
|
| Q.トータルステーションの自動視準と自動追尾って何が違うの? |
A.自動視準、自動追尾のTSにはいずれもモータ駆動が内臓されています。
●自動視準機は、自動的にターゲット(反射プリズムなど)を視準するようになっています。基準点測量など
で対回観測を行う場合、自動的に対回数を観測する事が出来ます。
●自動追尾機は、ターゲット(反射プリズムなど)を自動で追尾して、ターゲット側でTSをコントロールする事
ができるようになり、ワンマン測量が可能になります。各メーカーではビデオスコープを搭載した機種が
発売されており、ターゲットの画像を見ながら測るポイントを指示できる機種もあります。
|
Q.GPS(GNSS)とは?  |
A.GPSとは”Global Positioning System"の頭文字を取った略語で、地球上のいかなるところも人工衛星からの
電波を受信・解析することにより、その位置を知ることができるシステム。全地球測位システム(GPS)は、
米国防総省が開発し管理している無線ナビゲーション規格です。GNSSとは、各国が運用している
衛星測位システムの総称です。
|
| Q.GNSSを利用した測量にはどんな方式があるの? |
A.
・単独測位
電波が発信されてから受信機に到達するまでに要した時間を測り、距離に変換します。4個以上の衛星から
観測点までの距離を同時に知ることにより、観測点の位置を決定します。約10mの誤差。船舶や飛行機、
自動車などのナビゲーションとして利用されています。
・相対測位
2台以上の受信機を使い、同時に4個以上の同じGNSS衛星を観測します。GNSS衛星の位置を基準とし、
GNSS衛星からの電波信号がそれぞれの受信機に到達する時間差を測定して、2点間の相対的な位置関係を
求めます。
測量には、分解能の高い電波を利用して10kmで約1cmの誤差の精度で位置関係がわかります。
・DGPS測位、RTK-GPS測位
DGPSは、両点で単独測位を行い、基準局において位置成果と観測された座標値の差を求め、観測点に
補正情報として送信します。
RTK-GPSは、両点で位相の測定を行い基準局で観測した位相データを観測点に送信します。
観測点のGNSS受信機では、受信データと基準局から送信されたデータをリアルタイムで解析することにより、
観測点の位置を決定します。DGPSは数m、RTK-GPSは数cmの誤差で位置が決定されます。
・ネットワーク型RTK-GPS(GNSS)測位 ※VRS-GNSS
ネットワーク型RTK-GPS測量は、観測に含まれる誤差を電子基準点のリアルタイム観測データ等を利用して
補正することで、RTK-GPSと同程度の測位精度が得られる方式です。
|
| Q.VRS-GNSSの基準点測量で直接観測法と間接観測法って何? |
A.
・直接観測法
直接観測法は、固定点と移動点で同時にGPS衛星からの信号を観測し、基線解析により得られた基線ベクトル
を用いて、多角網を構成する方法である。直接観測法による観測距離は、500メートル以内を標準とする。
隣接する2点と往復のVRS点2点を使用した間接ベクトル4辺で環を構成し、環閉合差により点検計算をする。
・間接観測法
間接観測法は、固定点と2点の移動点でGPS衛星からの信号を同時に観測し、基線解析により得られた2つの
基線ベクトルの差を取って観測点間(移動点間)の基線ベクトルを求め、その基線ベクトルを用いて、多角網を
構成する方法である。間接観測法による観測距離は、直接的に観測する放射状の基線では10キロメートル以内、
間接的に求める観測点間では500メートル以内を標準とする。
①1台準同時観測・・・1台の受信機、作業者1名で作業が行え、往路は逆順で観測を行い、間接ベクトルの
セット間較差により点検計算をする。
②2台同時観測・・・2台の受信機を同時使用して、往復・2回観測は不要で片道観測で済む
(環閉合差で点検の場合)
※観測手順については、Q&A 測量機(その他製品)をご参照下さい。
Q&A 測量機(その他製品)
|
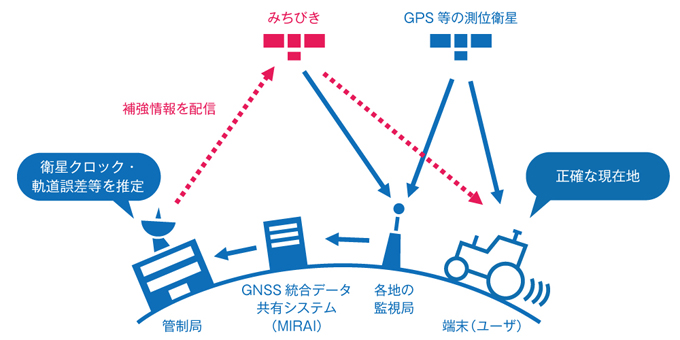
| Q.QZSSって何? |
A.準天頂衛星システムのことです。準天頂衛星システムとは、複数機の人工衛星により構成される日本を含む
アジア・オセアニア地域をカバーする地域的衛星測位システムです。GPSなどの衛星測位システムは、スマー
トフォンやカーナビでも活用され、私たちの生活になくてはならないものになっています。日本のほぼ真上
(準天頂)に長時間留まるよう工夫された準天頂衛星初号機「みちびき」を利用することで、山間部や高層ビル
街のようにGPS信号が届きにくい、見通しの悪い場所でも測位ができるようになるだけでなく、補強信号を
利用することで測位精度を数cmまで高めることができます。2010年に打ち上げられた「みちびき」を含め、
2018年度には4機体制でのサービスを、将来的に7機体制でのサービスを目指して開発が進められています。
現在、測量分野では、スタティック観測やVRS観測に対応したデータ配信サービスが始まっております。
(現在は1日7~8時間、将来は24時間の配信が予定されています。)
■各メーカGNSS受信機比較表(PDF) ■取得衛星について(PDF)
|
| Q.QZSSの衛星は何基あるの? |
A.衛星利用測位システム(GPS)衛星「みちびき」4基体制の本格運用が2018年11月1日からスタート
しました。
2010年9月に1号機が、2017年の6月、8月、10月にそれぞれ2、3、4号機が相次いで打ち上げられた。
1,2,4号機は日本からオーストラリアにかけた上空で8の字を描く「準天頂軌道」を周回して、3号機は静止
軌道を飛行しています。4号機の打ち上げ成功で、日本版GPSの本格運用に必要な4基体制になり、その後
さまざまな試験が行われてきました。「みちびき」4基の本格運用が始まったことにより、常時少なくとも
1つの衛星は、日本のほぼ真上の軌道を飛行するため、信号受信が遮られる場所でも安定して高い精度の
位置情報が得られる事が期待されます。政府は、「宇宙基本計画」で2023年度をめどに米国GPS衛星に頼
る必要がなくなる「みちびき」7基体制にする方針を定め、計画では2023年度までにさらに3基を打ち上げ
る予定です。

|
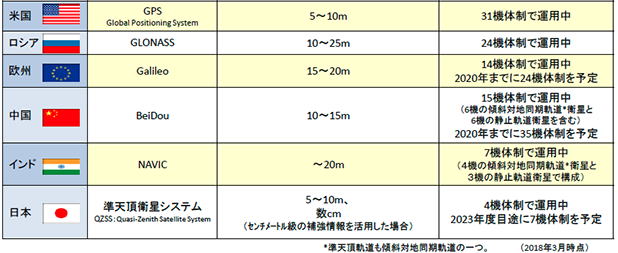
| Q.諸外国の測位衛星システムの運用状況は? |
A.
|
| Q.VRS-GPSの補足衛星は何が捕れるの? |
A.ほとんどのメーカではGPSのL1、L2、L2C、L5やGLONASS、Galileo、QZSS、BeiDouに対応した機種が発売
されています。機種によって対応未対応、オプション対応等がありますのでカタログ等で確認しましょう。
またGPSデータ配信会社との契約が必要となりますが、配信会社によってどの補足衛星、周波数、信号に
対応しているか確認しましょう。
■各メーカGNSS受信機比較表(PDF) ■取得衛星について(PDF)
|
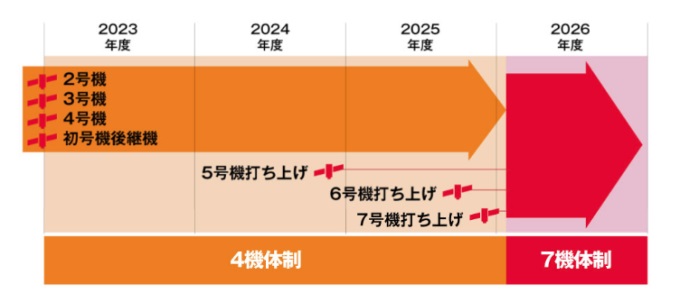
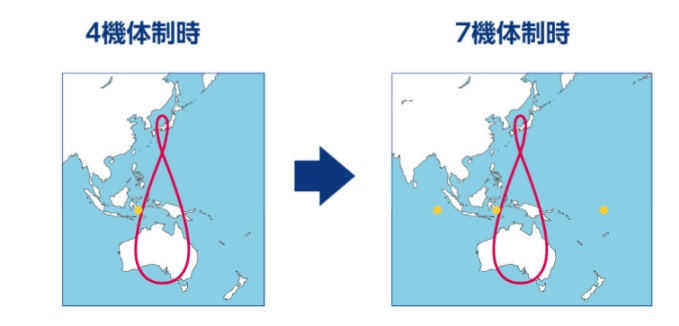
| Q.みちびき(QZSS)の7機体制について教えて? |
A.みちびき(準天頂衛星システム)は、2018年11月より4機体制でサービスを開始しました。
2023年12月に改訂された宇宙基本計画工程表において、「7機体制構築に向け、H3ロケットの開発状況を
踏まえて、2024年度から2025年度にかけて順次準天頂衛星を打ち上げ、引き続き着実に開発・整備を進め
る」と記載されています。
衛星測位には、4機以上の測位衛星が必要になります。みちびきの7機体制が確立されると、日本上空に常
に4機以上のみちびきの衛星が滞空するようになるため、みちびき単独での持続測位が可能となります。


※送信信号の詳細につきましては送信信号一覧よりご参照下さい。
|
| Q.VRS-GPSの補足衛星は何が捕れるの? |
A.ほとんどのメーカではGPSのL1、L2、L2C、L5やGLONASS、Galileo、QZSS、BeiDouに対応した機種が発売
されています。機種によって対応未対応、オプション対応等がありますのでカタログ等で確認しましょう。
またGPSデータ配信会社との契約が必要となりますが、配信会社によってどの補足衛星、周波数、信号に
対応しているか確認しましょう。
■各メーカGNSS受信機比較表(PDF) ■取得衛星について(PDF)
|
| Q.マルチGNSSのメリットとは? |
A.利用可能な衛星数が多ければ多いほど、衛星測位に有利なことは明らかである。
① 衛星数とDOP・・・衛星数の増加により、DOP(衛星配置による精度指標)の改善や観測可能時間の増加が期待
でき、不可能であった場所や時間帯での測量作業が可能となる。
② 衛星の見え方・・・例としてGLONASS の軌道傾斜角は65°で、GPS の55°よりも高いことから、高緯度地域
ほど北方向の衛星数が増えることが期待できる。
③ 測位率・・・上空視界がかなり遮られる環境の場合、GPS だけでは衛星数が不足しRTK
解が得られない場所が
多いが、衛星を追加することによってRTK 測位率が向上する。
④ RTK 初期化時間・・・RTK初期化時間の短縮にも効果が現れます。
|
| Q.多チャンネル化によるメリットとは? |
A.① 線形結合の選択肢が増えることで電離層解析精度が向上し、長基線解析の精度向上が期待できる。
② 多チャンネル化はアンビギュイティ(整数値バイアス)の決定ルーチンにも大きく寄与し、RTKや
キネマティックの初期化時間は大幅に縮減されると考えられる。
|
| Q.高精度測位補強サービス「MADOCA-PPP」って何? |
A.アジア・オセアニア地域でも利用可能な高精度な測位補強サービスを提供するために、国内外のGNSS監視
局網の観測データに基づき測位衛星に起因する誤差を計算し、みちびきのL6信号により補正データを送信
します。ユーザはL6信号対応受信機を用いることでPPP方式の高精度測位を行うことができます。
本サービスの補強データはアジア・オセアニア地域で広く利用することができますので、国外や
海洋分野での様々な活用が期待されます。2022年9月30日より試行運用を開始し、2024年4月1日より
本運用を開始しました。
|
| Q.NMEAファイルって何ですか? |
A.NMEA(National Marine Electronics Association)形式のデータを含むGPSファイルで、緯度、経度、
時間の値で構成されるASCIIテキストのデータのことです。NMEA出力ができる機器として、ハンディGPS
やGNSS(GPS)受信機、各種計測機器や海上航法装置など様々な機器に搭載されています。
●NMEA 0183規格・・・単純なASCII、シリアル通信プロトコル
●センテンス(メッセージ)形式(アプリケーションレイヤー)
・$GPGGA Position Response Message(Max82byte)
UTC時刻、緯度、北緯/南緯、経度、東経/西経、位置特定品質、使用衛星数、アンテナの海抜高さ、
メートル、ジオイド高さ、メートル、RTCM通信からの時間、差動基準地点ID、チェックサム値
・$GPZDA Time and Date Response Message(Max36Byte)
UTC時刻、日、月、西暦、ローカル時刻との差(時間)、ローカル時刻との差(分)、チェックサム
・$GPGSV Satellites-in-View Response Message(Max70Byte)
総GSVセンテンス数、センテンスの番号、ビュー内の総衛星数、衛星番号、衛星仰角、衛星方位角、C/No
・$GPVTG Course over Ground and Ground Speed Response Message(Max46Byte)
移動の真方位、True course、Magnetic course、地表における移動の速度、knot、
地表における移動の速度、Km/h、モード、チェックサム値
・$GPGLL Geograpic Position-Lattude/Lonitude (Max47byte)
緯度、北緯/南緯、経度、東経/西経、UTC時刻、単独orDGPS測位、
単独測位(DOP値、2次元測位中はHDOP、3次元測位中はPDOP )、チェックサム値
・$GPGSA Satellite Used Response Message(Max69byte)
2次元測位/3次元測位自動切り替え、3次元測位中、衛星番号、PDOP値、HDOP値、VDOP値、チェックサム
・$GPRMC Recommended Minimum Course Response Message(Max77Byte)
UTC時刻、単独測位中/DGPS測位中、緯度、北緯/南緯、経度、東経/西経、速度、
真方位による進行方向、日付、磁気偏差、測位mode、チェックサム
|
| Q.VRS-GNSSで配信データのフォーマット種類についてお知えて? |
A.リアルタイム配信データのフォーマットの種類
|
フォー
マット |
対応マウントポイント名
(配信システムにおける接続先) |
対象衛星 |
1エポックの
データサイズ |
| VRS 方式 |
Multi Station 方式 |
| RTCM2.3 |
VRS_RTCM23 |
RTK_RTCM23 |
GPS |
500 バイト |
| RTCM3.1 |
VRS_RTCM3(GNSS) |
RTK_RTCM3(GNSS) |
GPS, GLONASS |
210 バイト |
| RTCM3.2 |
VRS_RTCM32(GNSS) |
RTK_RTCM32(GNSS) |
GPS, GLONASS, QZSS |
215 バイト |
| CMRx |
VRS_CMRx(GNSS) |
RTK_CMRx(GNSS) |
GPS, GLONASS, QZSS |
130 バイト |
| CMR+ |
VRS_CMR_Plus(GNSS) |
RTK_CMR_Plus(GNSS) |
GPS, GLONASS |
200 バイト |
| CMR |
VRS_CMR |
RTK_CMR |
GPS |
200 バイト |
|
※1エポックのデータサイズ
ここでは、11衛星の捕捉状況で、8エポックごとに位置とアンテナ情報を送信すると仮定した場合に必要と
なる、1エポック(1秒)あたりの平均データサイズを表します。
また上記のようにフォーマットの「CMRx」は、他フォーマットと比較してもデータ圧縮率が高いため、
効率的にデータ通信が行えます。そのため「CMRx」がご利用可能な受信機の場合には「CMRx」のご利用を
推奨します。
|
| Q.GNSS観測での公共測量におけるアンテナ高の入力ついてお知えて? |
A.公共測量でのスタティック及び短縮スタティック測量では、アンテナ高の算出について、PCV補正を行う
事になっています。アンテナ高としてはアンテナ高をデータコレクターに入力します。
基線解析ソフトはアンテナ
種別をもとにPCV補正を行い、正確なアンテナ高を計算します。RTK測量では
従来のアンテナ定数を用いたアンテナ高入力となります。アンテナ高はデータを計算するために不可欠です。
必ず測って記録又はデータコレクターへ入力して下さい。
■ソキア・トプコンの場合
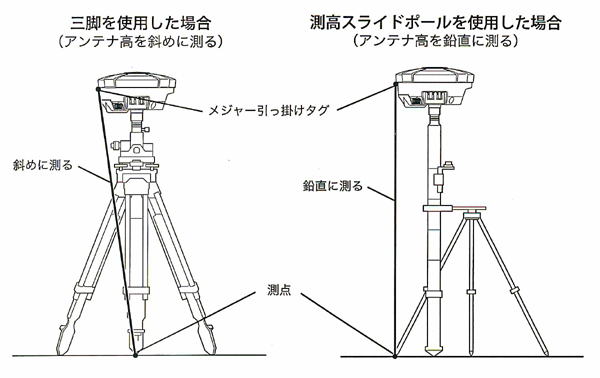
アンテナ高は、メジャーをメジャー引っ掛けタグに引っ掛けて測点中央を測ります。(斜めに測る)
VRS、RTKの場合は「補正」を押しアンテナ高補正をだし、リストからアンテナ名を選択し、アンテナ高計算
を押します。位相中心までの高さを自動計算します。
スタティックの場合、メジャーをメジャー引っ掛けタグに引っ掛けて測点の高さで垂直に測ります。
取扱説明書に記載されているメジャー引っ掛けタグとアンテナ底面高の数値を垂直で測った数値から
引いてアンテナ高を入力します。又は直接、底面と測点を垂直に測ってデータコレクターへアンテナ高を
入力します。 ※スタティック観測の場合は、アンテナ高計算はしません。
【例/GRX1・GRX2・SDR8 RTK+・SDR8 Static+ の場合】
■VRS・RTK観測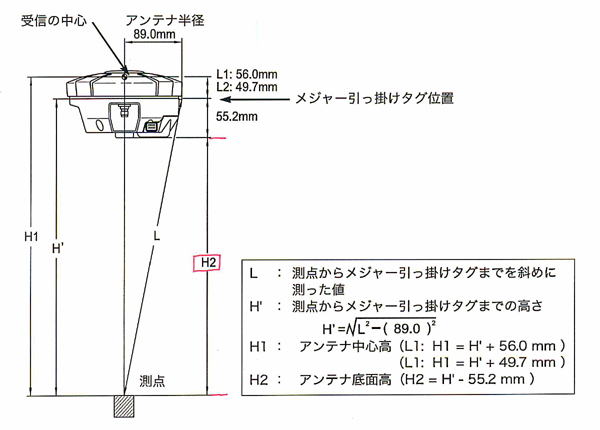
※ソキア SDR8 RTK+ ※トプコン HiPer
V + GNSS MAGNET Field
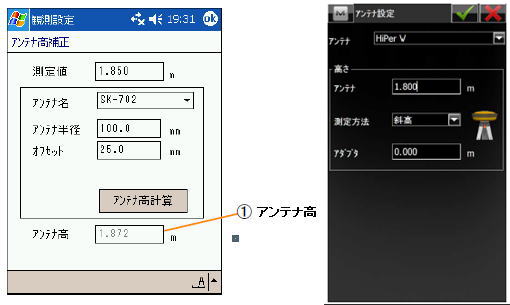
■スタティック観測

■Trimbleの場合
データコレクターにアンテナ底面高を入力します。VRS、RTKの場合はアンテナ定数を用いて位相中心までの
高さを自動計算します。スタティックの場合はそのままアンテナ底面高が入り、位相中 心の高さの自動計算は
しません。
【例/R10・SKY Controller の場合】

●アンテナ底面高を入力する場合、ワンタッチアダブターを着けている場合は、アダプターの高さ分を
足して数値を入力して下さい。
例) R12(i)/R10の場合 / 2m継ぎポール + 5cmワンタッチアダプター = 2.050m
R8sの場合 / 2m継ぎポール + 10cmワンタッチアダプター = 2.100m
R8sの場合 / 2m継ぎポール + ワンタッチアダプター使用しない = 2.000m
R4sの場合 / 2m継ぎポール = 2.000m
汎用伸縮ポールの場合 / 伸縮ポール + 専用アダプター = 目盛直読
※専用アダプターにつきましては、伸縮ポールのメーカーの説明書
をご参照下さい。(一部メーカーはQ&A測量機/その他製品に記載有り)
|
| Q.トータルステーションで望遠鏡を回転すると、エラーが表示される。 |
A.角度検出でエンコーダというガラス分度を使っている機種があります。望遠鏡を速く回転したことにより
検出がうまくいかなくなり、エラーが表示される場合があります。望遠鏡の回転は静かに回して下さい。
また、水平誤差を修正するために磁気センサーを搭載している機種では、水平が磁気センサー修正範囲を超
えてる場合、エラーが表示される場合があります。望遠鏡気泡管・横縦気泡管・円形気泡管をきちんと合わ
せて下さい。
|
| Q.バッテリーを充電しても、すぐ「BATTRY LOW」表示がでてしまう。 |
A.バッテリーの寿命がきています。新しいバッテリーに交換して下さい。電子セオドライトなどで乾電池を
使っている機種の場合は、新しい乾電池に交換して下さい。機種によっては(特にバッテリー柱上タイプ)
内部の
バッテリーだけ交換ができますのでご相談下さい。また、メーカで販売中止しているバッテリーで
も、セル交換にて対応いたします。
|
| Q.トランシットまたはトータルステーションで正反視準をして誤差がでてしまう。 |
A.高度・水平のどちらがくるっているかご確認下さい。高度分度または水平分度の目盛合わせ調整が必要とな
ります。分解調整修理となりますのでご連絡下さい。一部のトータルステーションの機種で、高度分度が
くるってきた場合、ユーザーにて補正ができる機種もありますのでご説明書をご参照下さい。
|
| Q.回転式レーザーレベルでローターが回転しない。 |
A.一部のメーカー機種によっては回転しないタイプの機種もあります。ロータが回転する機種で回転しない
場合は、機械の水平がきちんととれていない場合があります。水平を取り直して下さい。また、バッテリー
の電圧低下でも発生する場合がありますので新しい電池の交換または充電を行って下さい。状況が改善さ
れない場合、ロータ部が故障している可能性がありますので、ご連絡下さい。
|
| Q.校正証明書または測量機器検定書は発行できますか? |
A.有償にて発行できます。事前に機械の調整検定を行う必要があります。金額は機種によって異なりますので
ご連絡下さい。また日数も要しますのでご相談下さい。
|
| Q.公正測量機器検定書は発行できますか? |
A.(公)日本測量協会又は日本測量機器工業会の検定があります。お預かりして点検整備を行ったのち、
予約申し込みをしてから検定を行ってもらい検定証明書を発行してもらいます。検定に要する期間は、
およそ1週間~1ケ月間で季節によって変わります。検定金額は機種によって変わりますので、検定所
のサイトで御確認下さい。
|
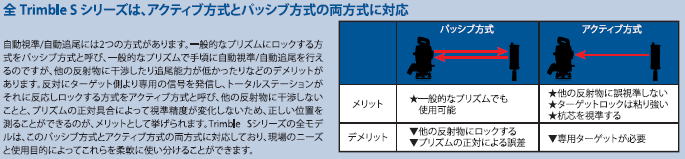
| Q.追尾トータルステーションのパッシブ方式とアクティブ方式って何? |
A.一般的なプリズムにロックする方式をパッシブ方式と呼びます。
|
| Q.現場から戻ってきた時の機械の保管方法は? |
A.外気温と室温の差が大きい時または雨降りに使用した時は、ケースから機械を出して外装の結露や機械温度
が冷たくなっていない事を確認してから、ケースへ格納しましょう。結露した状態でケースへ格納した場合、
ほとんどの測量機は完全防水仕様ではないので、機械内部の基盤を破損させてしまうケースがあります。
各機種の保護等級につきましては、トップページの資料(PDF)をダウンロードしてご参照下さい。
|
| Q.GNSS受信機のロールオーバーって何に? |
A.米国GPSの時刻管理は、週番号と週初めからの時間で行われ、1980年1月6日から1023週の次に再び0週に
戻ります。この週が戻ることをロールオーバーと言います。
ロールオーバー日時:2019年4月7日(日) 8時59分42秒(日本時間)
■GNSS受信機で影響を受ける機種・又はソフトウェア (各メーカー/測量向け製品のみ記載)
|
| メーカ名 |
機種 |
対応バージョン |
分類 |
| トプコン |
Hiper HR , GR-5 , MR-2 , NET-G5 |
Ver.5.2.2 |
GNSS受信機 |
| HiPer V , HiPerⅡ , HiPer SR , GRS-1 |
Ver.4.7p10 |
| NET-G3A , MR-1 |
Ver.4.7p6 |
| GB-3 |
Ver.4.0p7 |
| MAGNET Field |
Ver.5.2 |
ソフトウェア |
| GNSS-Pro |
Ver.3.01.0.0 |
| ソキア |
ATLAS , GCX3 , GNR5 |
Ver.5.2.2 |
GNSS受信機 |
| GCX2 , GRX2 , GRX1 , GSX2 |
Ver.4.7p10 |
| MAGNET Field |
Ver.5.2 |
ソフトウェア |
| GNSS-Pro |
Ver.3.01.0.0 |
ニコン
トリンブル |
5700 , 5800 ,R2 , R4 , R5 , R7 , R8 , R8s
R9s , R10/R10LT , NetR9 |
Ver2.32以降 |
GNSS受信機 |
| R4s |
Ver3.81以降 |
| ライカ |
System 1200・GPS900・GS / GR / GM / GG |
想定対応済み |
GNSS受信機 |
| System500 |
サポート終了・
未対応 |
|
|
| Q.SIMA共通フォーマット(座標データ)の形式についてお知えて? |
A.SIMA形式の内容は下記の通りです。
|
■共通フォーマット
バージョン番号、現場名称
| G00 |
, |
バージョン番号 |
, |
現場名称 |
CR/LF |
コメント
座標データ出力開始区分
座標データ
| A01 |
, |
点番号 |
, |
点名称 |
, |
X |
, |
Y |
, |
Z |
, |
CR/LF |
※点番号=5桁の整数、点名称=20桁まで
座標データ出力終了区分
■SIMA形式(座標)送受信データ例
G00,01050331-1,1
Z00,/ザヒョウ/,
A00,
A01, 1,0,0.0000,0.0000,0.0000,
A01, 2,1,10.000,0.0000, ,
A01, 3,2,-10,0000,0.0000, ,
A01, 4,3,0.000,10.0000, ,
A99,
|
|
| Q.APAフォーマット(観測データ)の概要についてお知えて? |
A.APAフォーマットは、一般社団法人 日本測量器機工業会 が作成した、測量器機とPC間等でデータを
共有するためのデータ規格の一つです。
■APAフォーマットの概要
単純なカンマ区切りのCSVファイルです
(基本的に半角英数字ですが、現行のVer02では漢字に対応しています)。
Windows のメモ帳などで編集できます。行の最後の文字はチェックサムです。
ファイルの1行目は A で始まり、最終行は Z (&はチェックサムです)で始まります。
行頭の英字(識別記号)の意味
A スタートブロック APAフォーマットのバージョンなど
B グループ1:業務名など
C グループ2:天候、気圧など
D グループ3:測点名、器高、対回数など、
E グループ4:再測あり・なし
F グループ5:目標点名、目標高、水平角、鉛直角、斜距離などAPAデータの一番重要な行
G グループ6:測点名、XYZ座標値
Z APAファイルの最終行に出力されます。
APAデータのサンプル
A,01,Z,
----------- B行 とC行 は削除 ---------
( BC行がなくても手簿は作成され、該当セルが空欄になります)
D,T1,,1.430,0,9911029,21:32,00:00,Z, ------------ 1点目
E,0,-,
F,BS,,0.000,r9001,0.0000,87.1740,,,,,000,L,
F,1,,1.400,r9002,331.5920,88.4455,17.665,,,,000,#,
F,2,,1.400,r9003,340.1745,88.5210,16.903,,,,000,V,
F,3,,0.200,r9004,330.2905,93.5345,13.690,,,,000,X,
F,4,,0.200,r9005,316.3410,94.4105,11.582,,,,000,N,
D,略 ----------------------------------------------------------------
2点目
E,略
F,略
Z,&,
|